专做公司网站 大庆热搜榜上2023年热搜
院子摄像头的监控和禁止区域入侵检测相比,多了2个功能:1)如果检测到有人入侵,则把截图保存起来,2)如果检测到有人入侵,则向数据库插入一条事件数据。
打开checkingfence.py,添加如下代码:
# -*- coding: utf-8 -*-'''
禁止区域检测主程序
摄像头对准围墙那一侧用法:
python checkingfence.py
python checkingfence.py --filename tests/yard_01.mp4
'''# import the necessary packages
from oldcare.track import CentroidTracker
from oldcare.track import TrackableObject
from imutils.video import FPS
import numpy as np
import imutils
import argparse
import time
import dlib
import cv2
import os
import subprocess# 得到当前时间
current_time = time.strftime('%Y-%m-%d %H:%M:%S',time.localtime(time.time()))
print('[INFO] %s 禁止区域检测程序启动了.'%(current_time))# 传入参数
ap = argparse.ArgumentParser()
ap.add_argument("-f", "--filename", required=False, default = '',help="")
args = vars(ap.parse_args())# 全局变量
prototxt_file_path='models/mobilenet_ssd/MobileNetSSD_deploy.prototxt'
# Contains the Caffe deep learning model files.
#We’ll be using a MobileNet Single Shot Detector (SSD),
#“Single Shot Detectors for object detection”.
model_file_path='models/mobilenet_ssd/MobileNetSSD_deploy.caffemodel'
output_fence_path = 'supervision/fence'
input_video = args['filename']
skip_frames = 30 # of skip frames between detections
# your python path
python_path = '/home/reed/anaconda3/envs/tensorflow/bin/python' # 超参数
# minimum probability to filter weak detections
minimum_confidence = 0.80 # 物体识别模型能识别的物体(21种)
CLASSES = ["background", "aeroplane", "bicycle", "bird", "boat","bottle", "bus", "car", "cat", "chair", "cow", "diningtable","dog", "horse", "motorbike", "person", "pottedplant", "sheep","sofa", "train", "tvmonitor"]# if a video path was not supplied, grab a reference to the webcam
if not input_video:print("[INFO] starting video stream...")vs = cv2.VideoCapture(0)time.sleep(2)
else:print("[INFO] opening video file...")vs = cv2.VideoCapture(input_video)# 加载物体识别模型
print("[INFO] loading model...")
net = cv2.dnn.readNetFromCaffe(prototxt_file_path, model_file_path)# initialize the frame dimensions (we'll set them as soon as we read
# the first frame from the video)
W = None
H = None# instantiate our centroid tracker, then initialize a list to store
# each of our dlib correlation trackers, followed by a dictionary to
# map each unique object ID to a TrackableObject
ct = CentroidTracker(maxDisappeared=40, maxDistance=50)
trackers = []
trackableObjects = {}# initialize the total number of frames processed thus far, along
# with the total number of objects that have moved either up or down
totalFrames = 0
totalDown = 0
totalUp = 0# start the frames per second throughput estimator
fps = FPS().start()# loop over frames from the video stream
while True:# grab the next frame and handle if we are reading from either# VideoCapture or VideoStreamret, frame = vs.read()# if we are viewing a video and we did not grab a frame then we# have reached the end of the videoif input_video and not ret:breakif not input_video:frame = cv2.flip(frame, 1)# resize the frame to have a maximum width of 500 pixels (the# less data we have, the faster we can process it), then convert# the frame from BGR to RGB for dlibframe = imutils.resize(frame, width=500)rgb = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)# if the frame dimensions are empty, set themif W is None or H is None:(H, W) = frame.shape[:2]# initialize the current status along with our list of bounding# box rectangles returned by either (1) our object detector or# (2) the correlation trackersstatus = "Waiting"rects = []# check to see if we should run a more computationally expensive# object detection method to aid our trackerif totalFrames % skip_frames == 0:# set the status and initialize our new set of object trackersstatus = "Detecting"trackers = []# convert the frame to a blob and pass the blob through the# network and obtain the detectionsblob = cv2.dnn.blobFromImage(frame, 0.007843, (W, H), 127.5)net.setInput(blob)detections = net.forward()# loop over the detectionsfor i in np.arange(0, detections.shape[2]):# extract the confidence (i.e., probability) associated# with the predictionconfidence = detections[0, 0, i, 2]# filter out weak detections by requiring a minimum# confidenceif confidence > minimum_confidence:# extract the index of the class label from the# detections listidx = int(detections[0, 0, i, 1])# if the class label is not a person, ignore itif CLASSES[idx] != "person":continue# compute the (x, y)-coordinates of the bounding box# for the objectbox = detections[0, 0, i, 3:7]*np.array([W, H, W, H])(startX, startY, endX, endY) = box.astype("int")# construct a dlib rectangle object from the bounding# box coordinates and then start the dlib correlation# trackertracker = dlib.correlation_tracker()rect = dlib.rectangle(startX, startY, endX, endY)tracker.start_track(rgb, rect)# add the tracker to our list of trackers so we can# utilize it during skip framestrackers.append(tracker)# otherwise, we should utilize our object *trackers* rather than#object *detectors* to obtain a higher frame processing throughputelse:# loop over the trackersfor tracker in trackers:# set the status of our system to be 'tracking' rather# than 'waiting' or 'detecting'status = "Tracking"# update the tracker and grab the updated positiontracker.update(rgb)pos = tracker.get_position()# unpack the position objectstartX = int(pos.left())startY = int(pos.top())endX = int(pos.right())endY = int(pos.bottom())# draw a rectangle around the peoplecv2.rectangle(frame, (startX, startY), (endX, endY),(0, 255, 0), 2)# add the bounding box coordinates to the rectangles listrects.append((startX, startY, endX, endY))# draw a horizontal line in the center of the frame -- once an# object crosses this line we will determine whether they were# moving 'up' or 'down'cv2.line(frame, (0, H // 2), (W, H // 2), (0, 255, 255), 2)# use the centroid tracker to associate the (1) old object# centroids with (2) the newly computed object centroidsobjects = ct.update(rects)# loop over the tracked objectsfor (objectID, centroid) in objects.items():# check to see if a trackable object exists for the current# object IDto = trackableObjects.get(objectID, None)# if there is no existing trackable object, create oneif to is None:to = TrackableObject(objectID, centroid)# otherwise, there is a trackable object so we can utilize it# to determine directionelse:# the difference between the y-coordinate of the *current*# centroid and the mean of *previous* centroids will tell# us in which direction the object is moving (negative for# 'up' and positive for 'down')y = [c[1] for c in to.centroids]direction = centroid[1] - np.mean(y)to.centroids.append(centroid)# check to see if the object has been counted or notif not to.counted:# if the direction is negative (indicating the object# is moving up) AND the centroid is above the center# line, count the objectif direction < 0 and centroid[1] < H // 2:totalUp += 1to.counted = True# if the direction is positive (indicating the object# is moving down) AND the centroid is below the# center line, count the objectelif direction > 0 and centroid[1] > H // 2:totalDown += 1to.counted = Truecurrent_time = time.strftime('%Y-%m-%d %H:%M:%S',time.localtime(time.time()))event_desc = '有人闯入禁止区域!!!'event_location = '院子'print('[EVENT] %s, 院子, 有人闯入禁止区域!!!' %(current_time))cv2.imwrite(os.path.join(output_fence_path, 'snapshot_%s.jpg' %(time.strftime('%Y%m%d_%H%M%S'))), frame)# insert into databasecommand = '%s inserting.py --event_desc %s --event_type 4 --event_location %s' %(python_path, event_desc, event_location)p = subprocess.Popen(command, shell=True) # store the trackable object in our dictionarytrackableObjects[objectID] = to# draw both the ID of the object and the centroid of the# object on the output frametext = "ID {}".format(objectID)cv2.putText(frame, text, (centroid[0] - 10, centroid[1] - 10),cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)cv2.circle(frame, (centroid[0], centroid[1]), 4, (0, 255, 0), -1)# construct a tuple of information we will be displaying on the# frameinfo = [#("Up", totalUp),("Down", totalDown),("Status", status),]# loop over the info tuples and draw them on our framefor (i, (k, v)) in enumerate(info):text = "{}: {}".format(k, v)cv2.putText(frame, text, (10, H - ((i * 20) + 20)),cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 0, 255), 2)# show the output framecv2.imshow("Prohibited Area", frame)k = cv2.waitKey(1) & 0xff if k == 27:break# increment the total number of frames processed thus far and# then update the FPS countertotalFrames += 1fps.update()# stop the timer and display FPS information
fps.stop()
print("[INFO] elapsed time: {:.2f}".format(fps.elapsed())) # 14.19
print("[INFO] approx. FPS: {:.2f}".format(fps.fps())) # 90.43# close any open windows
vs.release()
cv2.destroyAllWindows()执行下行命令即可运行程序:
python checkingfence.py --filename tests/yard_01.mp4同学们如果可以把摄像头挂在高处,也可以通过摄像头捕捉画面。程序运行方式如下:
python checkingfence.py程序运行结果如下图:
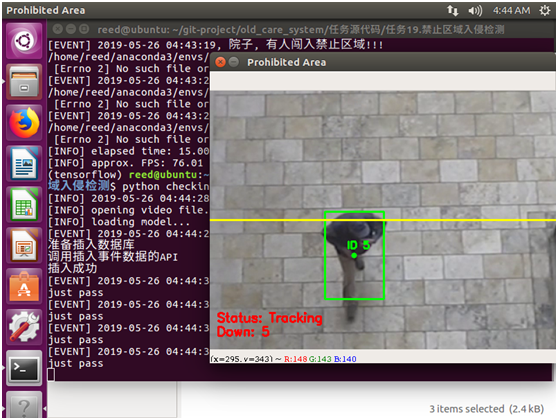
图1 程序运行效果
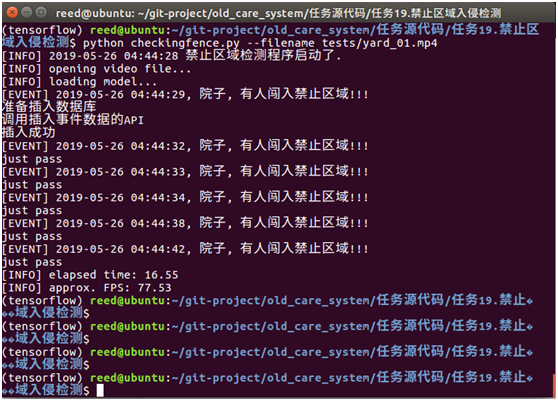
图2 程序运行控制台的输出
supervision/fence目录下出现了入侵的截图。
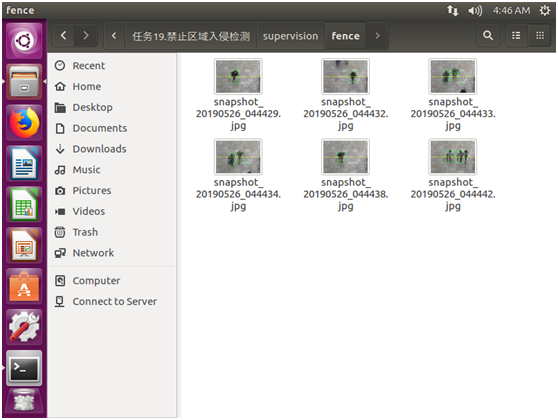
图3 入侵截图被保存