时尚flash网站松松软文
系列文章目录
【附带源码】机械臂MoveIt2极简教程(一)、moveit2安装
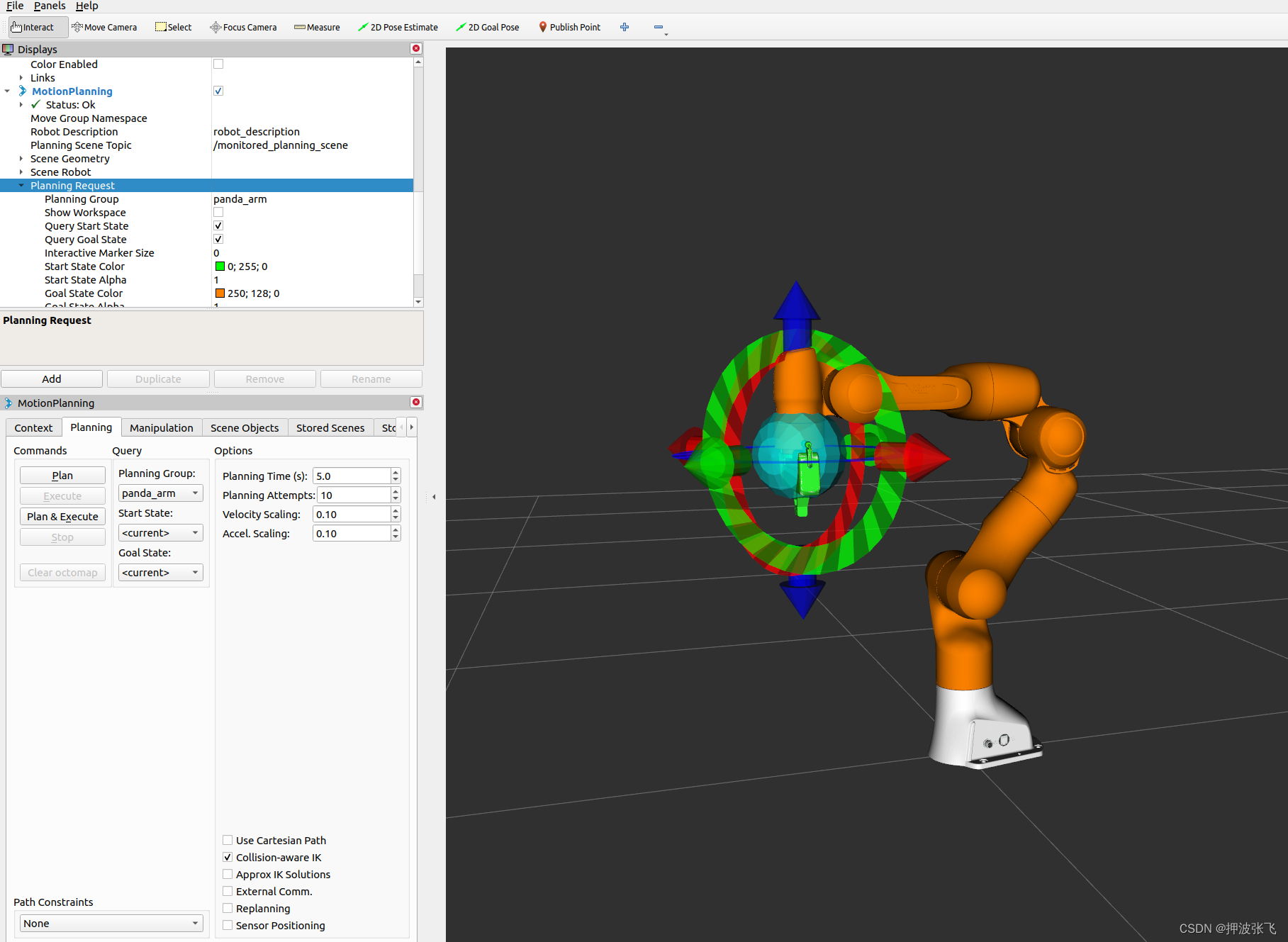
【附带源码】机械臂MoveIt2极简教程(二)、move_group交互
【附带源码】机械臂MoveIt2极简教程(三)、URDF/SRDF介绍
【附带源码】机械臂MoveIt2极简教程(四)、第一个入门demo
目录
- 系列文章目录
- 1. 创建package
- 2. 修改C++代码
- 3. 修改CMakeLists.txt
- 4. 创建launch文件
- 5. 编译
- 6. 运行
这里单独写一个简单的入门demo,更好地帮助大家学习和理解MoveIt2的使用。
其实在教程(二)中展示了好几个demo,感兴趣的同学可以跳转去看一下。
1. 创建package
可以新建一个工作空间,也可以在第一节创建的ws_moveit2工作空间里。
mkdir -p ~/ws_moveit2/src
cd ~/ws_moveit2/src
ros2 pkg create --build-type ament_cmake --dependencies rclcpp --node-name demo_moveit demo_moveit
2. 修改C++代码
demo_moveit.cpp代码如下:
#include <memory>#include <rclcpp/rclcpp.hpp>
#include <moveit/move_group_interface/move_group_interface.h>int main(int argc, char *argv[])
{// Initialize ROS and create the Noderclcpp::init(argc, argv);auto const node = std::make_shared<rclcpp::Node>("demo_moveit",rclcpp::NodeOptions().automatically_declare_parameters_from_overrides(true));// Create a ROS loggerauto const logger = rclcpp::get_logger("demo_moveit");// Next step goes here