网站 导出链接福州seo排名优化
一、概述
上面一篇中我们已经得出了一个结论,就是ICP虽然简单,但是也有明显的缺点
1、计算速度慢,收敛慢,迭代次数多
2、对内存的开销比较大
3、很容易陷入局部最优的困局
因此我们在经典ICP的基础上添加一两个约束:
第一个约束就是添加法向量,计算当前点R半斤内的法向量,算法向量的夹角
第二个约束就是添加曲率,添加曲率
这样我们就可以减少迭代的次数,加速收敛。
二、计算点云的法向量和曲率
原理:
找到当前点pi的r 半斤类的所有的点V,然后计算出当前点集V的均值ui,然后开始计算V到的协方差

由于协方差的对称性,我们可以对这个矩阵进行SVD矩阵分解

曲率:
是按照从小到大的顺序排列的,那么曲率可以计算:
,并且
越小表示当前点云半斤内越平坦
最小的特征值对应的就是法向量的方向。
数学技巧篇69:特征值、特征向量的求法与证明 - 知乎
法向量
求解最小特征值的特征向量即为法向量

法向量的定向
从上面我们可以计算出法向量,那么法向量如何定向呢,也就是说一条直线你规定那个方向为正方向呢???
可以用视点Vp *Ni(当前点的法向量) >0 为正 等
PCL中的法向量定向
已知视点Vp ,对于任意的半径内的点坐标Pi 以及其对应的法向量ni,其定向如下:

flipNormalTowardsViewpoint (const PointT &point, float vp_x, float vp_y, float vp_z, Eigen::Vector4f &normal);
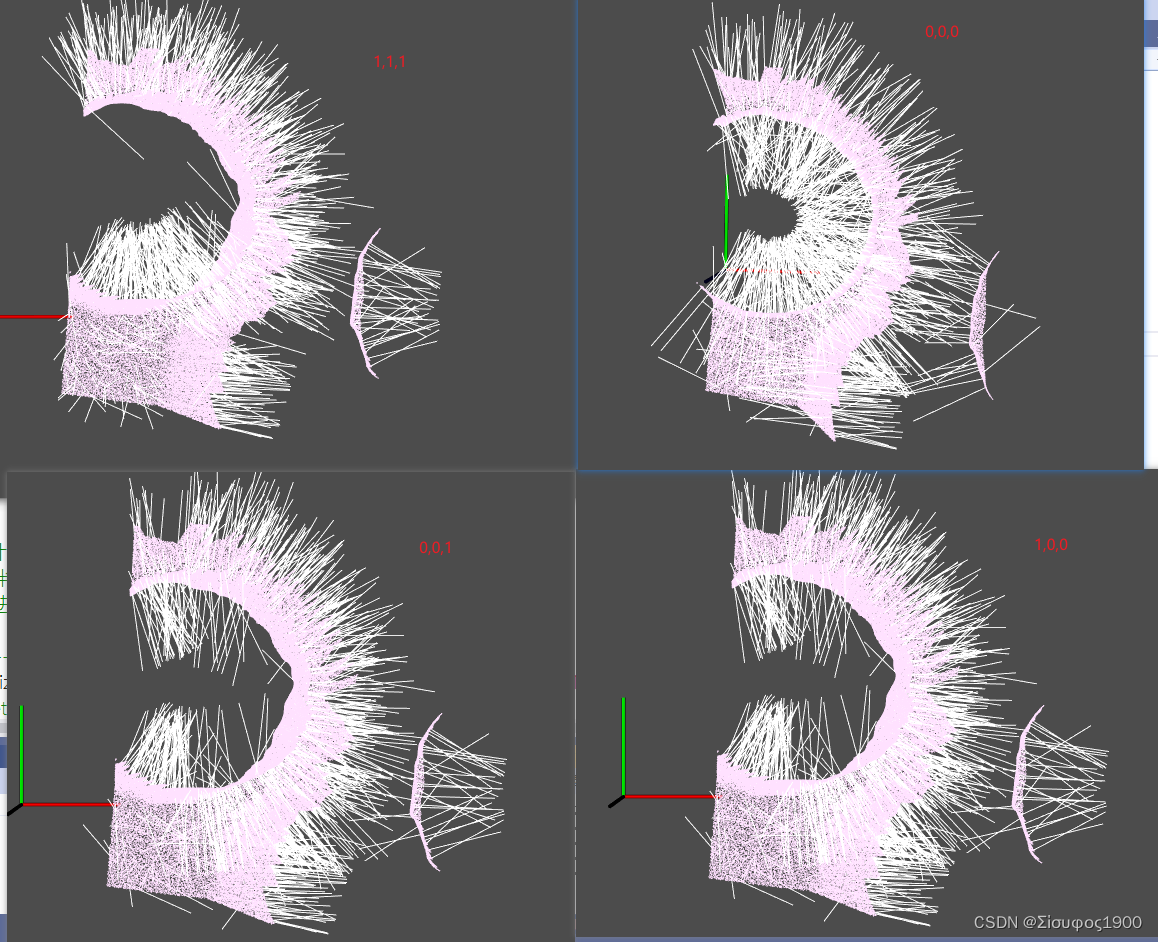
法向量方向测试

比较如下
code
#include <pcl/io/pcd_io.h>
#include <pcl/kdtree/kdtree_flann.h>
//#include <pcl/features/normal_3d.h>
#include <pcl/features/normal_3d_omp.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <boost/thread/thread.hpp>
#include "vtkAutoInit.h"
VTK_MODULE_INIT(vtkRenderingOpenGL);
VTK_MODULE_INIT(vtkInteractionStyle);
VTK_MODULE_INIT(vtkRenderingFreeType)#if 1int main()
{//------------------加载点云数据-------------------//C:\Users\Albert\Desktop\halcon_to_pcl\normal\normaltest2.pcdpcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);if (pcl::io::loadPCDFile<pcl::PointXYZ>("C:\\Users\\Albert\\Desktop\\halcon_to_pcl\\classfiy\\0.pcd", *cloud) == -1){// 找不到点云文件return -1;}//------------------计算法线----------------------pcl::NormalEstimationOMP<pcl::PointXYZ, pcl::Normal> n;//OMP加速pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);//建立kdtree来进行近邻点集搜索pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());n.setNumberOfThreads(10);//设置openMP的线程数 我一般是10条就够了// 主要是改变这个值来看看点云的法向量的方向变换n.setViewPoint(1,1,1);//设置视点,默认为(0,0,0)n.setInputCloud(cloud);n.setSearchMethod(tree);n.setKSearch(10);//点云法向计算时,需要所搜的近邻点大小//n.setRadiusSearch(0.03);//半径搜素n.compute(*normals);//开始进行法向计//----------------可视化--------------boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("Normal viewer"));//viewer->initCameraParameters();//设置照相机参数,使用户从默认的角度和方向观察点云//设置背景颜色viewer->setBackgroundColor(0.3, 0.3, 0.3);viewer->addText("Normal", 10, 10, "text");//设置点云颜色pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> single_color(cloud, 255, 225,255);//添加坐标系viewer->addCoordinateSystem(0.1);viewer->addPointCloud<pcl::PointXYZ>(cloud, single_color, "sample cloud");//添加需要显示的点云法向。cloud为原始点云模型,normal为法向信息,10表示需要显示法向的点云间隔,即每10个点显示一次法向,0.1表示法向长度。viewer->addPointCloudNormals<pcl::PointXYZ, pcl::Normal>(cloud, normals, 100, 0.03, "normals");//设置点云大小viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");while (!viewer->wasStopped()){viewer->spinOnce(100);boost::this_thread::sleep(boost::posix_time::microseconds(100000));}return 0;}#endif 四、算法原理
五、算法流程