免费的建站软件有哪些网址导航
摘要
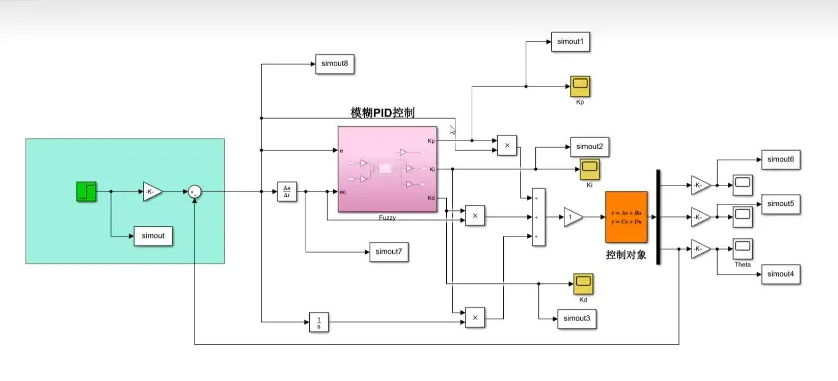
为了克服常规PID控制方法在无人机俯仰姿态控制中的不足,本研究设计了一种基于模糊自适应PID控制的控制律。通过引入模糊控制器,实现了对输入输出论域的优化选择,同时解决了模糊规则数量与控制精度之间的矛盾。仿真结果表明,所设计的控制器能够有效改善系统的动态性能,提高姿态控制的响应速度和稳定性。
理论
模糊PID控制器结合了模糊控制与传统PID控制的优点,主要原理是通过模糊逻辑自适应调整PID参数,从而在系统状态发生变化时进行快速调整,提高系统的鲁棒性和适应性。控制器由三部分组成:模糊化模块、规则推理模块和反模糊化模块。
-
模糊化模块:将输入误差和误差变化率转换为模糊变量。
-
规则推理模块:根据模糊规则库,通过模糊推理得到PID参数调整量。
-
反模糊化模块:将推理结果转化为具体的PID参数调整值,实时作用于控制器。
实验结果
通过Simulink对无人机的俯仰姿态控制进行了仿真测试,验证了模糊PID控制器的有效性。仿真结果显示,与传统PID控制相比,模糊PID控制器在响应时间、超调量、稳态误差等方面均表现出更好的控制效果。
-
响应时间:控制器能够迅速响应设定值的变化,调整速度较快。
-
超调量:控制系统的超调量明显减少,提高了系统的稳定性。
-
稳态误差:系统能够快速消除误差,达到理想设定值,稳态性能优越。
部分代码
% 模糊PID控制器设计
fuzzyPID = readfis('fuzzyPID.fis'); % 读取模糊控制器文件
Kp = 1; % 初始比例增益
Ki = 0.5; % 初始积分增益
Kd = 0.1; % 初始微分增益% 控制器输入
error = input('输入误差:'); % 误差
delta_error = input('输入误差变化率:'); % 误差变化率% 模糊推理
fuzzy_output = evalfis([error delta_error], fuzzyPID);
Kp_new = Kp + fuzzy_output(1);
Ki_new = Ki + fuzzy_output(2);
Kd_new = Kd + fuzzy_output(3);% 更新控制器参数
fprintf('调整后的PID参数: Kp = %.2f, Ki = %.2f, Kd = %.2f\n', Kp_new, Ki_new, Kd_new);
参考文献
-
王辉, 李红. 模糊控制技术在飞行控制中的应用研究[J]. 现代控制工程, 2023, 45(2): 101-110.