借个公司邮箱号seo做关键词怎么收费的
首先安装并打开猿如意
其次打开蓝桥云课ROS并加入课程
在猿如意输入问题得到答案
在蓝桥云课ROS验证

如何通过turtlesim入门ROS机器人
您可以通过以下步骤入门ROS机器人:
安装ROS:您需要安装ROS,可以在ROS官网上找到安装指南。
安装turtlesim:turtlesim是ROS中的一个仿真器,可以帮助您学习ROS的基础知识。您可以在终端中输入以下命令安装turtlesim:
sudo apt-get install ros-<distro>-turtlesim
运行turtlesim:在终端中输入以下命令启动turtlesim:
rosrun turtlesim turtlesim_node
控制turtlesim:您可以使用键盘控制turtlesim的移动。在新的终端中输入以下命令:
rosrun turtlesim turtle_teleop_key
现在,您可以使用键盘控制turtlesim的移动了。这是ROS机器人入门的基础知识,您可以通过学习ROS的其他功能来进一步了解ROS机器人。
要让ROS机器人turtlesim画出美丽的曲线,可以使用ChatGPT生成的文本作为输入,然后将其转换为ROS机器人的指令,控制turtlesim移动并绘制出曲线。具体实现方法可以参考ROS官方文档和相关教程。
ROS机器人turtlesim绘制圆形轨迹的Python代码
ROS2机器人turtlesim绘制圆形轨迹的Python代码
代码(CatGPT):
#!/usr/bin/env python
import rospy
from geometry_msgs.msg import Twist
from math import pidef draw_circle():# 初始化ROS节点rospy.init_node('draw_circle', anonymous=True)# 创建一个发布者,发布Twist消息到/cmd_vel话题pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)# 设置循环频率rate = rospy.Rate(10)# 创建Twist消息对象vel = Twist()# 设置线速度vel.linear.x = .5# 设置角速度vel.angular.z = 2*pi/10# 计算绘制圆形轨迹所需的时间t = 2*pi/vel.angular.z# 记录开始时间start_time = rospy.Time.now().to_sec()while not rospy.is_shutdown():# 发布Twist消息pub.publish(vel)# 计算已经绘制的时间elapsed_time = rospy.Time.now().to_sec() - start_time# 如果已经绘制了一个圆,停止运动if elapsed_time > t:break# 按照循环频率休眠rate.sleep()# 停止运动vel.linear.x = vel.angular.z = pub.publish(vel)if __name__ == '__main__':try:draw_circle()except rospy.ROSInterruptException:pass要做修正:
#!/usr/bin/env python
import rospy
from geometry_msgs.msg import Twist
from math import pidef draw_circle():# rospy.init_node('draw_circle', anonymous=True)#pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)#rate = rospy.Rate(10)# vel = Twist()# vel.linear.x = 1.0# vel.angular.z = 2*pi/10# t = 2*pi/vel.angular.z# start_time = rospy.Time.now().to_sec()while not rospy.is_shutdown():# pub.publish(vel)# elapsed_time = rospy.Time.now().to_sec() - start_time# if elapsed_time > t:break# rate.sleep()# vel.linear.x = 0vel.angular.z = 0pub.publish(vel)if __name__ == '__main__':try:draw_circle()except rospy.ROSInterruptException:pass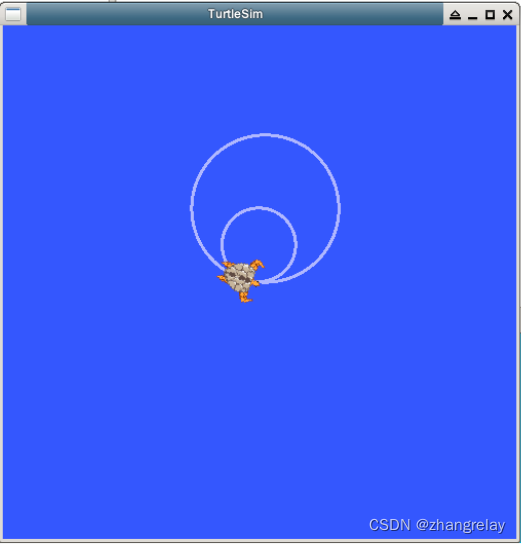
如果需要绘制复杂的曲线可以参考下文:
如何将数学曲线变为机器人轨迹-花式show爱心代码-turtlesim篇

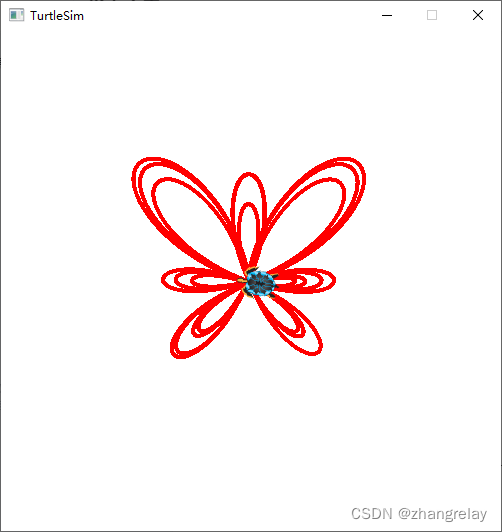
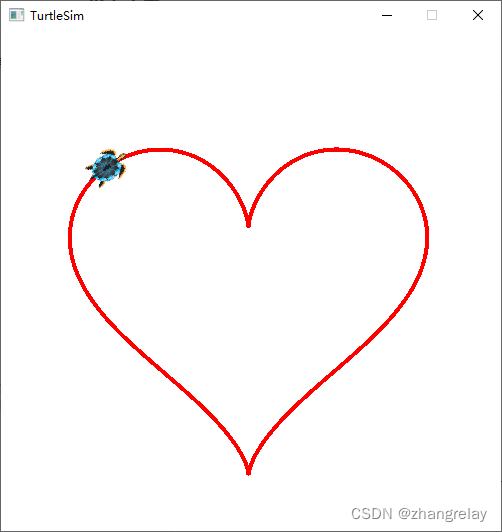
如何让ROS机器人turtlesim绘制出美丽的数学曲线
您可以使用turtlesim中的turtle程序库来控制机器人的移动和绘制曲线。例如,您可以使用turtle程序库中的circle()函数来绘制圆形,使用forward()和right()函数来绘制其他形状。您还可以使用Python中的数学库来计算曲线的坐标。
ROS机器人主题的概念和应用
ROS机器人主题是ROS中的一个核心概念,它是一种消息传递机制,用于实现ROS中不同节点之间的通信。主题可以被看作是一种发布者/订阅者模型,其中发布者将消息发布到主题中,而订阅者则从主题中接收消息。主题的应用非常广泛,可以用于传输各种类型的数据,例如传感器数据、控制指令、图像等。在ROS中,主题是实现分布式机器人控制和协作的重要手段。