自适应的网站如何做网页
**
玩转Matlab-Simscape(初级)- 09 - 在Simulink中创建曲柄滑块机构的控制模型
**
目录
- 玩转Matlab-Simscape(初级)- 09 - 在Simulink中创建曲柄滑块机构的控制模型
- 前言
- 一、问题描述
- 二、创建模型
- 2.1 识别机构中的刚体
- 2.2 确定刚体之间是如何相互连接的(关节副、约束等)
- 2.3 孤立每个刚体,简化刚体模型,并定义附着在其上的框架
- 2.4 使用关节和/或约束来组装刚体
- 2.5 利用“模型报告”(Model Report) 识别模型创建过程中产生的问题
- 2.6 利用 Mechanics Explorer 来识别和修复模型的其他问题
- 2.7 设置关节副目标位置以引导装配至所需位置
- 2.8 设置多体机构的输入和输出连接。测试和验证模型没问题后,再连接控制器并测试模型。
- 2.9 细化各个刚体,使模型更准确地表示实际机构
- 总结
前言
在产品开发中,多体动力学控制仿真是一种常见方法,本文从初学者的角度一点点解开应用Maltab simscape对多体进行仿真的面纱。写这篇博文是为后续做旋翼无人机的多体系统仿真打基础。欢迎各位小伙伴关注、赞赞、留言和收藏。
本文进一步深入学习复杂一点点的机构进行建模。
一、问题描述
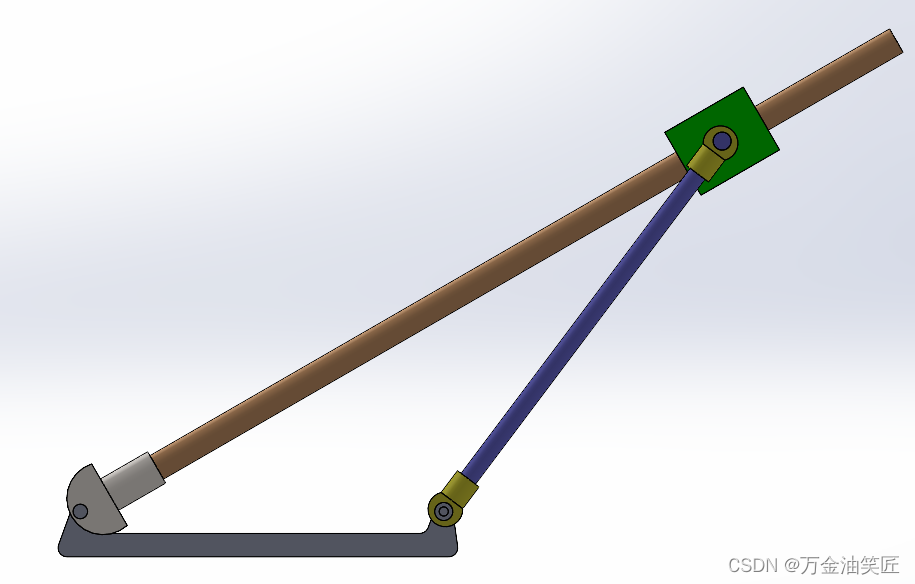
下图显示了用作瞄准系统的机构。该问题被简化为平面曲柄滑块机构。下图显示了该机构的原理图草图,仅提取了该机构工作的基本要素(通常在设计过程的早期阶段)。滑块 C 可以在杆 A 上滑动。电机在旋转接头 Ri 处施加扭矩,任务是跟踪旋转角的特定轨迹。

二、创建模型
构建模型时要遵循的一个关键原则是从简单的近似开始,以使基本机构先能正常工作。在随后的演进中,逐步增加了模型的复杂性,以使其更接近真实物理模型(也可以选择从CAD软件导入3D模型,这样更简单些)。Simscape Multibody 中推荐的模型构建过程可分为以下步骤:
利用SW中“Simscape Multibody Link”插件工具导出生成一个*.xml文件。

2.1 识别机构中的刚体
要分析的曲柄连杆机构有四个刚体
1.刚体 A(橙色)
2.刚体B(蓝色)
3.刚体 C(绿色)
4.刚体D(灰色)
2.2 确定刚体之间是如何相互连接的(关节副、约束等)
该机构具有以下关节副
- 刚体 A 和 D 通过旋转关节 Ro 连接。
- 刚体 A 和 C 通过棱柱形关节 Pg 连接。
- 刚体 C 和 B 通过旋转关节 Rg 连接。
- 刚体 B 和 D 通过旋转关节 Ri 连接。
此外,刚体 D 刚性地连接到全局世界框架 W(世界坐标系,全局坐标系),因为它是静止的。
2.3 孤立每个刚体,简化刚体模型,并定义附着在其上的框架
将生成的.xml文件,导入matlab simulink,并定义刚体和接口(零件与零件之间的配合运动副)。
利用命令smimport(‘**.xml’)导入xml文件。
通过定义刚体的形状、质量属性以及与其他零件的接口来定义刚体。每个刚体都是孤立地识别和定义的。在上面的例子中,该机构由四个刚体组成:A、B、C 和 D。
在 Simscape Multibody 中定义刚体 A 的形状。一旦定义了物体的形状并设定了它的密度,Simscape Multibody 就可以自动计算惯性。刚入门的小白推荐将刚体的形状简化为长度等于原始零件长度的简单圆柱体,而不是原本相当复杂的形状。

2.4 使用关节和/或约束来组装刚体
装配联结的过程包括附在刚体上的框架之间的关系建立。
2.5 利用“模型报告”(Model Report) 识别模型创建过程中产生的问题
在 Mechanics Explorer 中,从“工具”下拉菜单中选择“模型报告”选项 中,会显示出关节部分设置出现的错误。在这里可以查看错误。
2.6 利用 Mechanics Explorer 来识别和修复模型的其他问题
选择框架方向时,必须考虑到所需的零配置(关节的零配置是指当所有的关节角度为零时,基座与从动框架之间的相对位置和方向)。当关节角度为零时,通过调整各自主体上基座和从动框架的位置和方向,来定义由关节所关联的两个刚体的相对位置和方向。
2.7 设置关节副目标位置以引导装配至所需位置
打开“模型报告”(Model Report) 以查看此装配配置中关节位置的值。
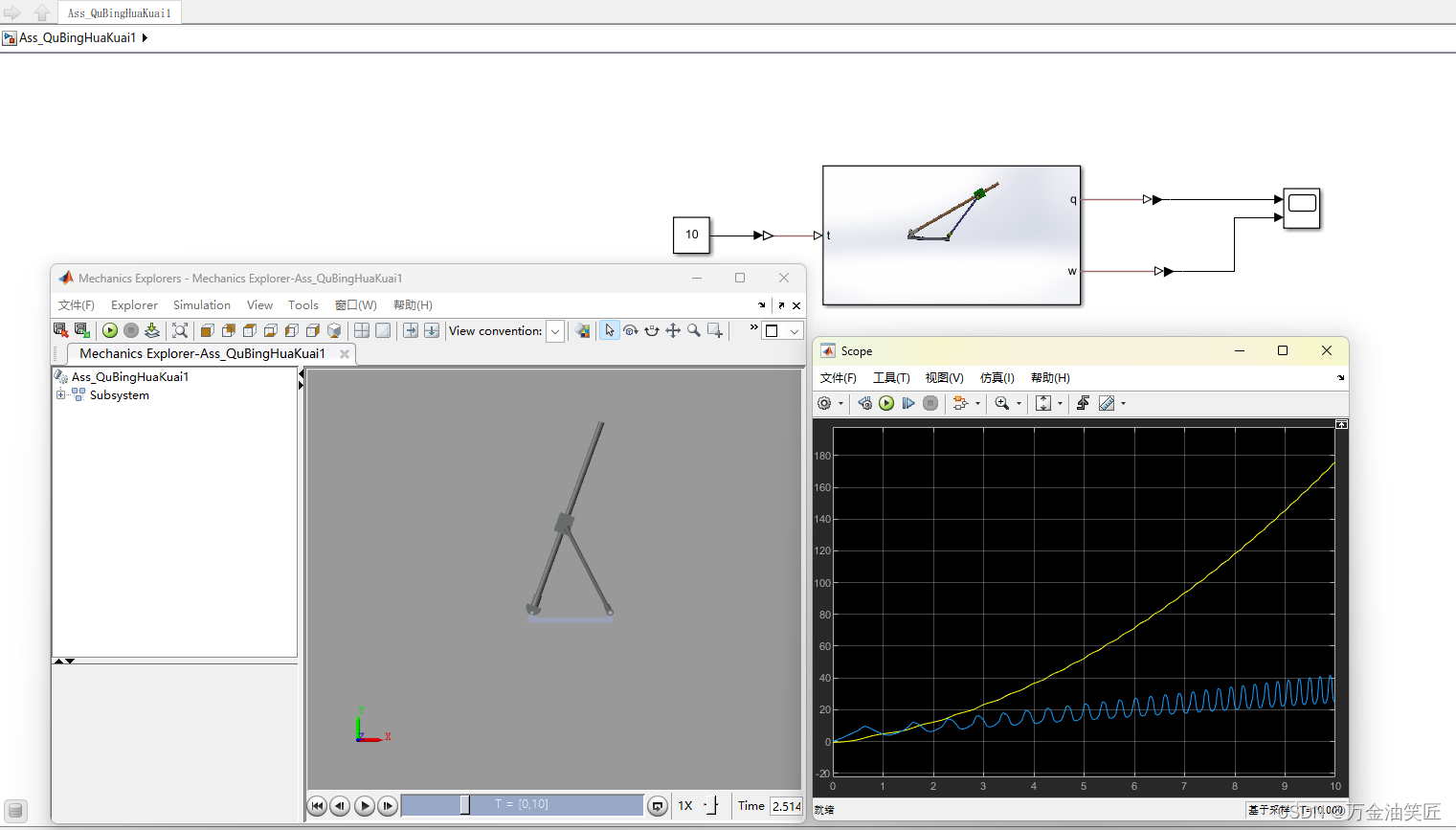
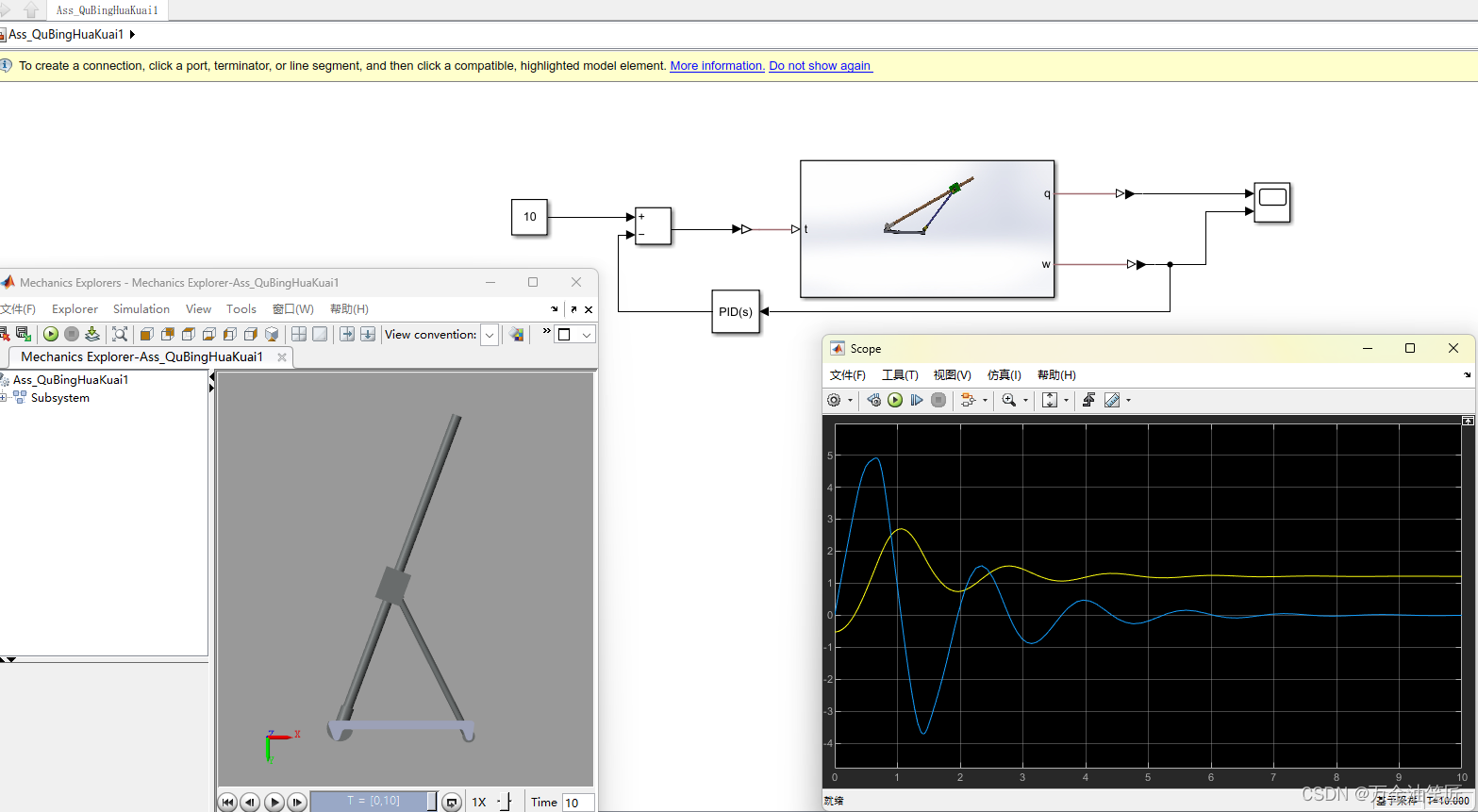
2.8 设置多体机构的输入和输出连接。测试和验证模型没问题后,再连接控制器并测试模型。
2.9 细化各个刚体,使模型更准确地表示实际机构
需要注意的是,SW中装配体建立时使用的配合方式,有时在导出xml文件时,会报错,导出的装配约束形式,貌似不能被Simulink识别。另外,3D模型如果发生了重建,Simulink模型又要重建,有些不方便,如何能一键更新呢?这个得再研究研究。
总结
以上就是今天分享的关于Matlab simscape 的基础内容,搭建了一个曲柄滑块机构的控制模型,进一步熟悉整个分析流程,为一步步研究复杂模型,打下基础。欢迎各位小伙伴关注、赞赞、留言和收藏。