自定义头像wordpress优化关键词首页排行榜
目录
前言
1.悬架系统
2.基于MPC的悬架系统仿真分析
2.1 simulink模型
2.2仿真结果
2.3 结论
3 总结
前言
模型预测控制是无人驾驶中较为热门的控制算法,但是对于悬架等这类系统的控制同样适用。
我们知道模型预测控制主要可以划分为三个部分:
(1) 预测模型。 预测模型是模型预测控制的基础, 能够根据历史信息和控制输入预测系统未来的输出。
(2) 滚动优化。 模型预测控制通过使某项性能评价指标最优来得到最优控制量, 这种优化过程不是离线进行的, 而是反复在线进行的, 这也是模型预测控制与传统最优控制的根本区别。
(3) 反馈校正。 为了抑制由于模型失配或者环境干扰引起的控制偏差,在新的采样时刻, 首先检测对象的实际输出, 并利用这一实时信息对基于模型的预测进行修正, 然后再进行新的优化。
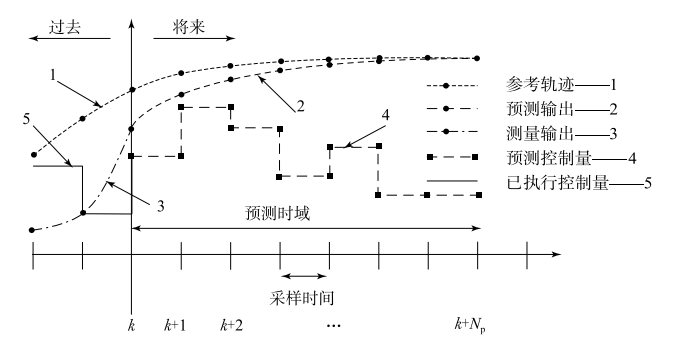
模型预测控制原理图
1.悬架系统
为了考察模型预测控制的效果,这里选用2自由度的悬架系统作为分析,至于悬架系统的数学建模和原理可以阅读往期文章:
半车(前后、左右)、整车悬架详细推导建模和simulink仿真分析_悬架自由度介绍_Mr. 邹的博客-CSDN博客
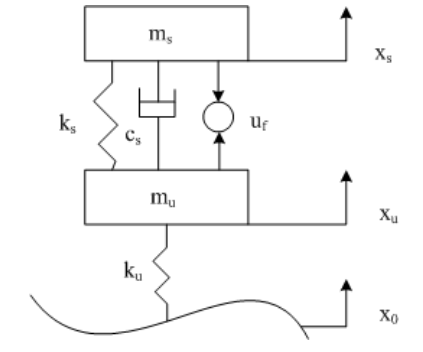
2自由度悬架系统结构
2.基于MPC的悬架系统仿真分析
2.1 simulink模型

2.2仿真结果
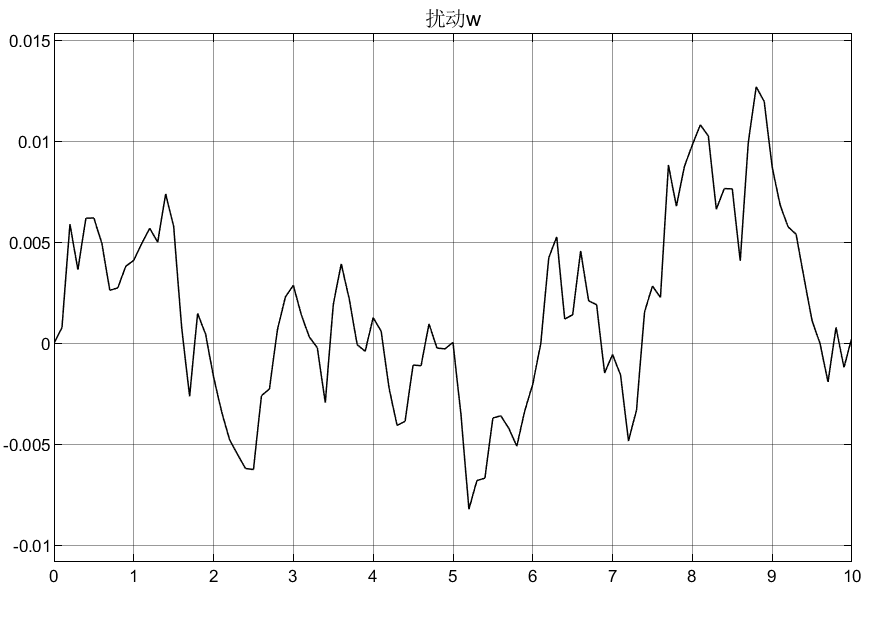
图1 C级随机路面激励
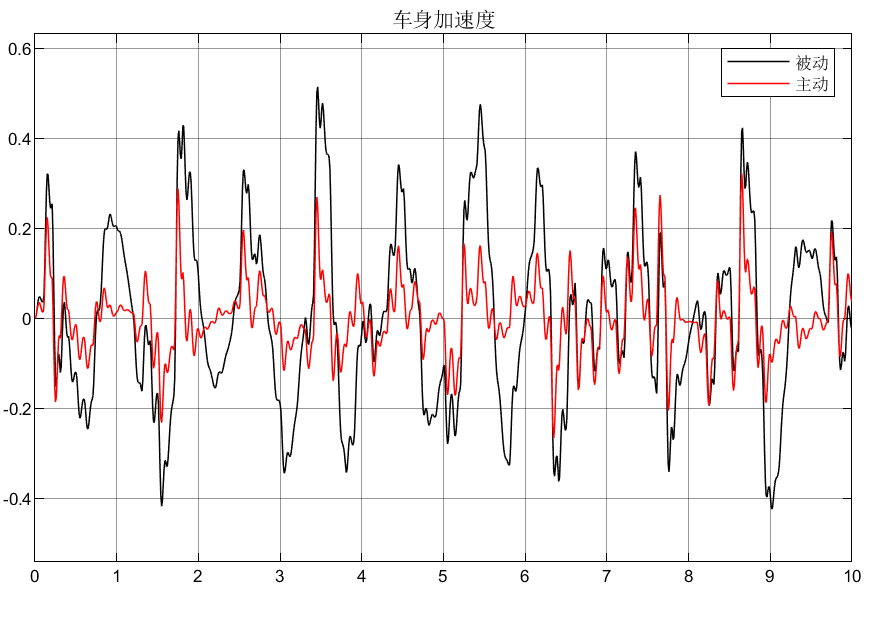
图2 车身加速度
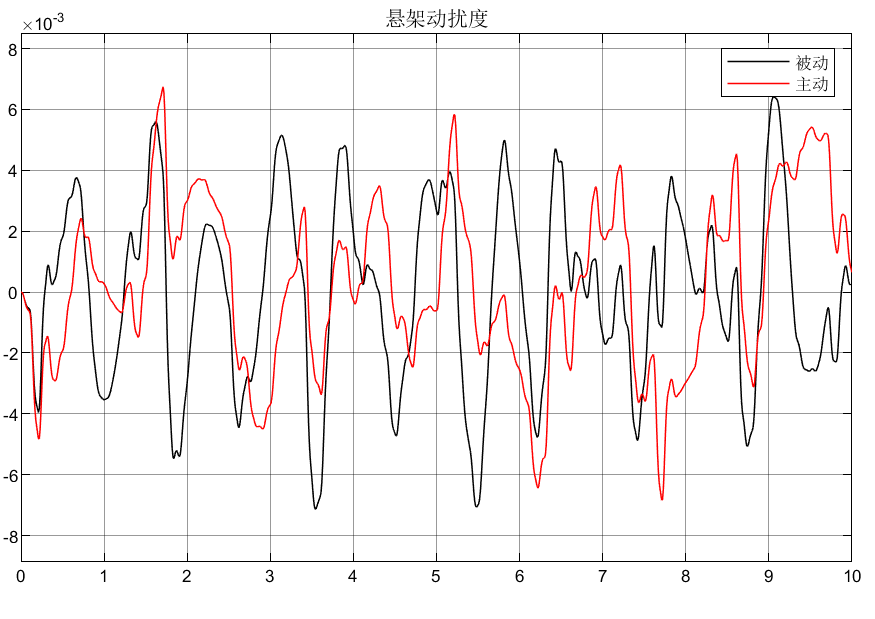
图3 悬架动扰度
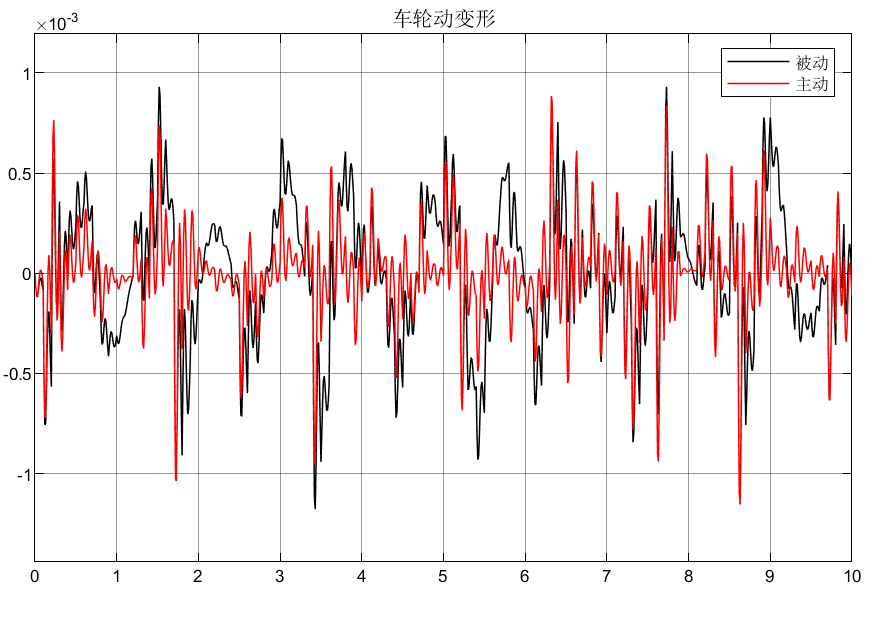
图4 车轮动变形
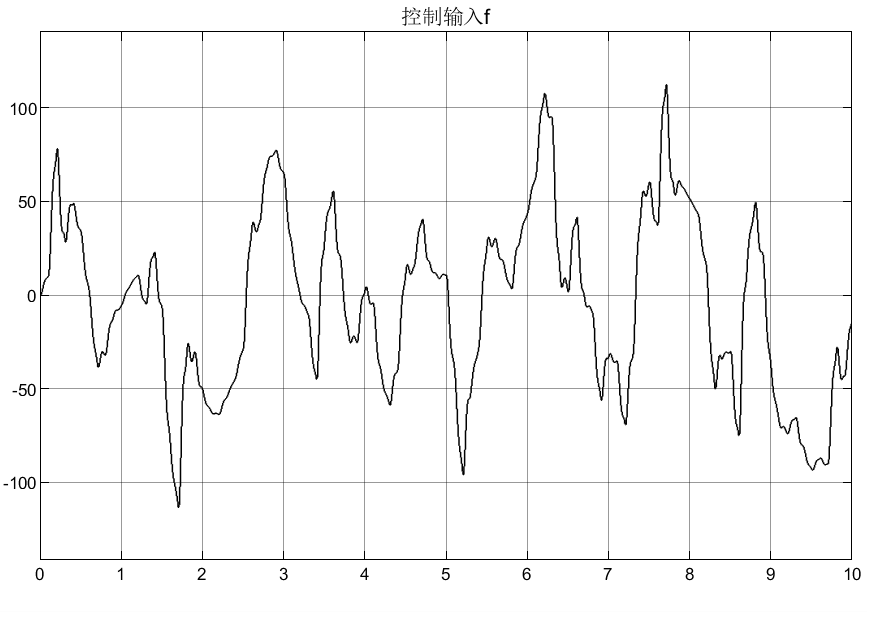
图5 主动控制力
2.3 结论
从图2可以看到,基于模型预测控制(MPC)的悬架控制很大程度的提高了乘坐舒适性,并且从图3和图4可以看到,改善车身加速度是基于车轮东变形和悬架动行程不被恶化的基础上改善的,说明了模型预测控制对于悬架上的应用也有较好的性能!
3 总结
①预测步长对于控制效果的影响很大,需要读者自行调节。
②权矩阵的调节需要一定的经验调节,是否可以先将LQR调节好的权矩阵直接用于MPC?这个小实验可以尝试。