长沙互联网公司排名电脑优化软件
目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
5.算法完整程序工程
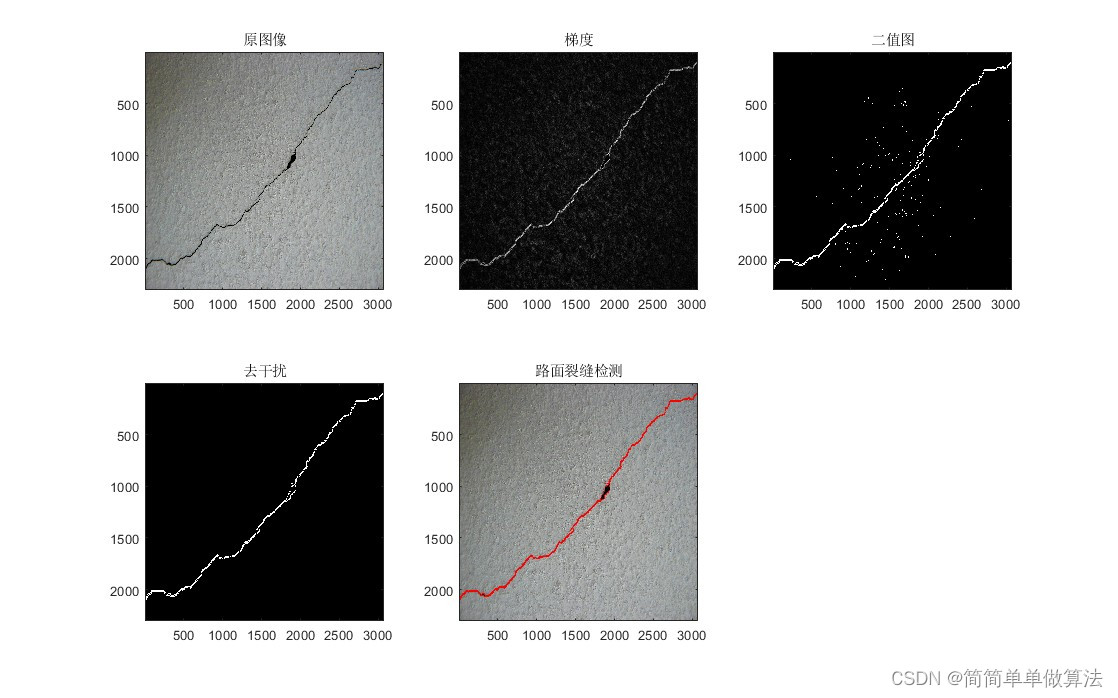
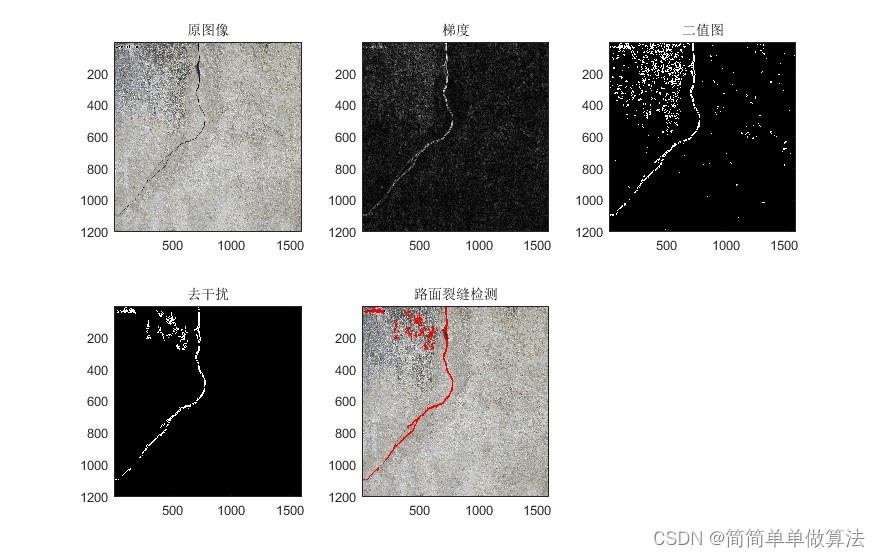
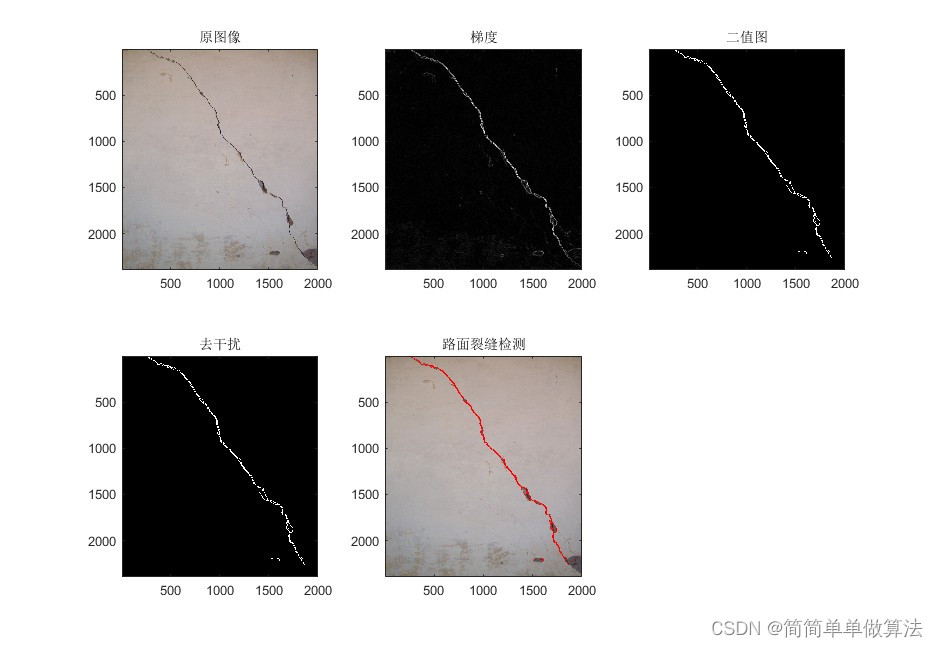
1.算法运行效果图预览

2.算法运行软件版本
matlab2022a
3.部分核心程序
[Rr,Cc] = size(Image1);% 获取 Image1 矩阵的大小(行数和列数)
% 创建一个高斯滤波器 G,大小为 9x9,标准差为 3
G = fspecial('gaussian',[9 9],3);
% 使用高斯滤波器 G 对图像 Image1 进行滤波处理,结果存入变量 Image2
Image2 = imfilter(Image1,G,'symmetric','same','conv'); % 创建三个 lxc 的零矩阵,分别用于存储 X 方向梯度、Y 方向梯度和梯度幅度
%Matrices grad
Ix = zeros(Rr,Cc);
Iy = zeros(Rr,Cc);
Ixy = zeros(Rr,Cc); % 使用 Sobel 算子计算图像的梯度,并存储在 IX、IY 和 Ixy 中
for i=2:Rr-1for j=2:Cc-1Ix(i,j) =-(-double(Image2(i-1,j-1))-2*double(Image2(i,j-1))-double(Image2(i+1,j-1))+double(Image2(i-1,j+1))+2*double(Image2(i,j+1))+double(Image2(i+1,j+1)))/8;Iy(i,j) =-(-2*double(Image2(i-1,j))+2*double(Image2(i+1,j))-double(Image2(i-1,j-1))+double(Image2(i+1,j-1))-double(Image2(i-1,j+1))+double(Image2(i+1,j+1)))/8;Ixy(i,j)= sqrt(((Ix(i,j))^2)+((Iy(i,j))^2));end
end% 进行二值化处理,使用滞后阈值法
Image3 = zeros(Rr,Cc);%binaire
lvl1 = 8;
lvl2 = 5;for i=1:Rrfor j=1:Ccif Ixy(i,j)>=lvl1 %如果梯度大于 lvl1 Image3(i,j)=255;elseif Ixy(i,j)<lvl2%如果梯度小于 lvl2 Image3(i,j)=0;endend
end
634.算法理论概述
路面裂痕检测是基于图像处理和机器视觉的一种重要应用。通过图像形态学处理和边缘提取算法,我们可以有效地检测出路面的裂痕。路面裂痕检测主要基于图像处理和机器视觉的原理。首先,通过图像采集设备获取路面的图像。然后,利用图像处理和形态学算法对图像进行预处理,以改善图像的质量并提取裂痕的特征。最后,利用边缘检测算法找出图像中的裂痕。
实现步骤
- 图像采集:首先,需要使用图像采集设备,如摄像头或无人机等,获取路面的图像。这一步是整个裂痕检测过程的基础。
- 图像预处理:由于采集的图像可能受到光照、噪声等因素的影响,需要进行一些预处理操作,例如灰度化、滤波等。此外,还可以使用对比度增强、亮度调整等方法来提高图像的对比度,以便更好地显示裂痕。
- 形态学处理:形态学处理是一种用于提取和增强图像特征的方法。在此处,我们主要使用腐蚀和膨胀操作来处理路面图像。腐蚀操作可以消除裂痕的末端,而膨胀操作则可以恢复这些末端。此外,形态学处理还可以用来去噪声、连接断开的裂痕等。
- 边缘提取:边缘是图像中裂痕的主要特征。我们可以使用各种边缘检测算法来找出这些边缘,例如 Sobel、Canny、Prewitt 等算法。这些算法主要通过计算像素点周围的梯度或强度变化来检测边缘。
- 后处理:在检测到裂痕后,我们可以使用一些后处理技术来提高检测结果的精度,例如霍夫变换来找出直线型的裂痕,或者使用动态规划等方法来连接断开的裂痕。
这里我们主要介绍两种常用的边缘检测算法,Sobel和Canny算法。
Sobel算法
Sobel算法通过计算像素点周围邻域的梯度来检测边缘。对于每个像素点 (x, y),它在两个方向上的梯度可以表示为:
G(x, y) = sqrt((x+1)^2 + (y+1)^2) - sqrt(x^2 + y^2)
G(x, y) 可以表示为水平方向梯度和垂直方向梯度 G1 和 G2:
G1(x, y) = sqrt((x+1)^2 + (y+1)^2) - sqrt(x^2 + y^2)
G2(x, y) = sqrt((x-1)^2 + (y+1)^2) - sqrt(x^2 + y^2)
然后,通过计算梯度的绝对值 |G1| 和 |G2|,并取两者中的最大值作为该像素点的梯度值:
G(x, y) = max(|G1|, |G2|)
最后,通过设定阈值来判断像素点是否为边缘:
if G(x, y) > threshold, then (x, y) is an edge pixel
Canny 算法
Canny 算法是另一种常用的边缘检测算法。它主要包含以下步骤:
- 对图像进行高斯滤波以去噪声。高斯滤波函数为:
g(x, y) = 1/(2pisigma^2)exp(-(x^2 + y^2)/(2sigma^2))
其中 sigma 是高斯函数的方差。
-
计算图像中每个像素点的梯度和方向:
对于每个像素点 (x, y),计算它周围像素点的梯度和方向:
Grad(x, y) = (f(x+1, y) - f(x-1, y))^2 + (f(x, y+1) - f(x, y-1))^2)1/2
Dir(x, y) = atan2((f(x, y+1) - f(x, y-1)), (f(x+1, y) - f(x-1, y))) -
应用非极大值抑制(Non-Maximum Suppression):将梯度方向上相邻的像素点进行比较,如果它们的梯度值都大于当前像素点的梯度值,那么当前像素点就不是边缘像素点。
-
双阈值处理:设定两个阈值 H1 和 H2,如果一个像素点的梯度值大于 H1,那么它就是一个边缘像素点;如果一个像素点的梯度值小于 H2,那么它就不是边缘像素点。
5.算法完整程序工程
OOOOO
OOO
O