用java做网站聊天的好处如何创建网站站点
目录
前言
1 ROS2安装与卸载
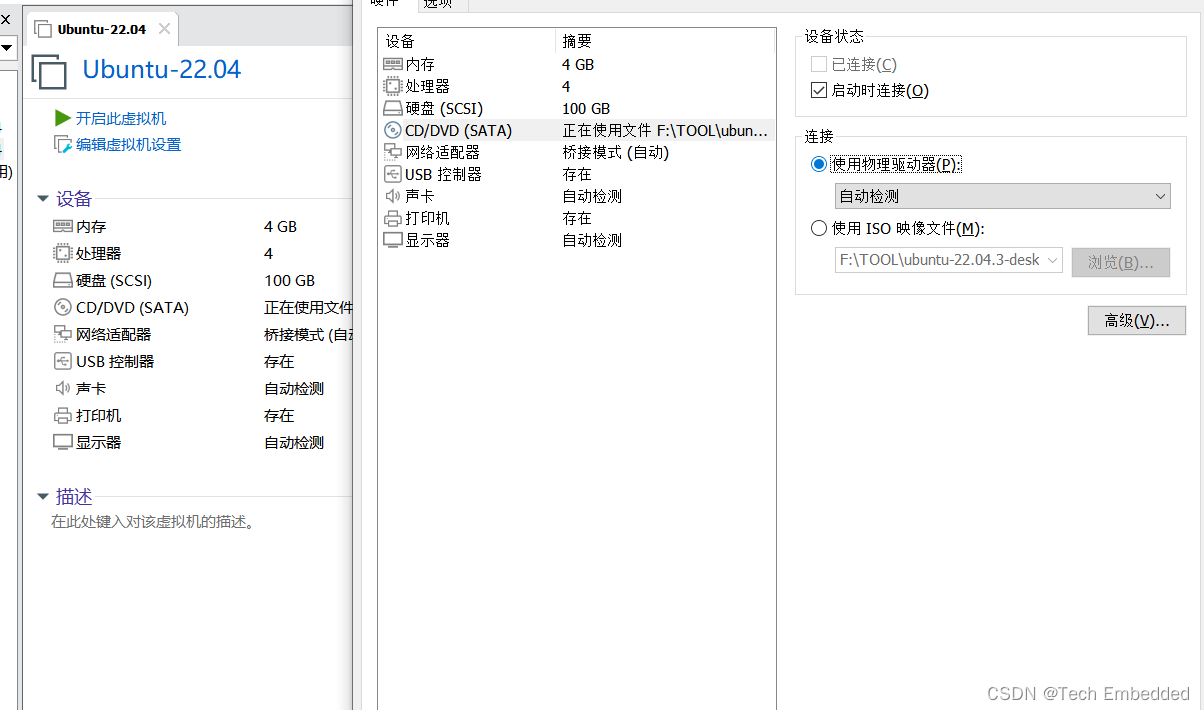
1.1 安装虚拟机
1.2 ROS2 humble安装
2 ROS2测试
2.1 topic测试
2.2 小海龟测试
2.3 RQT可视化
2.4 占用空间
前言
ROS2的前身是ROS,ROS即机器人操作系统(Robot Operating System),ROS为了“提高机器人软件复用率”的目标,时至今日,ROS已经广泛用于各种机器人的开发,无论是机械臂、移动机器人、水下机器人,还是人形机器人、复合机器人,统统都可以看到ROS的身影,ROS已经成为机器人领域的普遍标准。但是由于ROS自身的缺陷,如果在工业场景应用(例如无人驾驶)还需要做优化和定制,
ROS无法真正进入产业界,也自然无法产品化。为了解决这一问题,社区提出了ROS 2。使得ROS具备产品化的特性,包括实时性、适应于全平台、适用于性能低的硬件(MCU+RTOS)、分布式、数据加密和现代编程语言的支持。
1 ROS2安装与卸载
1.1 安装虚拟机
- 安装VMvare
- 安装Ubuntu22.04LTS
ubuntu下载地址:Ubuntu PC operating system | Ubuntu
1.2 ROS2 humble安装
设置语言环境
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8添加源
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null安装ros2 humble版本
sudo apt update && sudo apt upgrade
sudo apt install ros-humble-desktop设置ros2环境变量
source /opt/ros/humble/setup.bash
echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc ros2安装目录:安装目录在/opt/ros/humble下。
2 ROS2测试
2.1 topic测试
启动第一个终端,通过以下命令启动一个数据的发布者节点:
ros2 run demo_nodes_cpp talker
启动第二个终端,通过以下命令启动一个数据的订阅者节点:
ros2 run demo_nodes_py listener如果“Hello World”字符串在两个终端中正常传输,说明通信系统没有问题。
2.2 小海龟测试
启动第一个终端,通过以下命令启动一个数据的发布者节点:
ros2 run turtlesim turtlesim_node启动第二个终端,通过以下命令启动一个数据的订阅者节点:
ros2 run turtlesim turtle_teleop_key第一句指令将启动一个蓝色背景的海龟仿真器,第二句指令将启动一个键盘控制节点,在该终端中点击键盘上的“上下左右”按键控制小海龟运动。

2.3 RQT可视化
保持前面两个游戏在运行状态,打开终端,输入rqt。
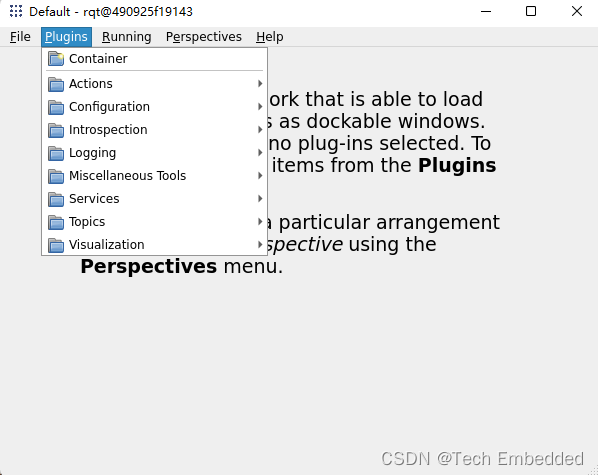
选择插件,这里我们可以选择现有的几个RQT插件来试一试,可以看到和话题、参数、服务、动作四大通信组件相关的工具都有,还有一些可视化、日志和系统计算图等相关的。
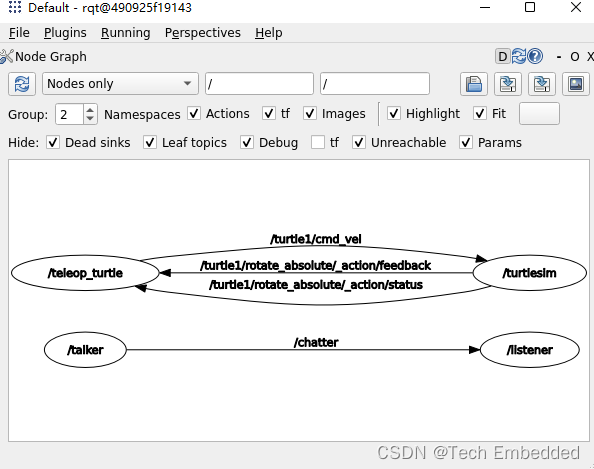
选择Introspection / Node Graph,打开后就可以看到上面几个节点之间的数据关系了,是不是很方便的工具。
2.4 占用空间
ubuntu安装前大小,默认最小化安装

ubuntu安装后大小
2.5 ROS2卸载
sudo apt remove ros-humble-*
sudo apt autoremove